



山东北工智能装备有限公司(山东北工机器人)
电话:0539-8056556(豪德店)
手机:13355053226(尹)
13355076661(陈)
13220533358(闫)
QQ: 2992886958
邮箱:beigongkuka@163.com
地址:临沂市罗庄区豪德五金机电城
75栋114-119号
山东北工智能装备有限公司(山东北工机器人)
电话:0539-8056556(豪德店)
手机:13355053226(尹)
13355076661(陈)
13220533358(闫)
QQ: 2992886958
邮箱:beigongkuka@163.com
地址:临沂市罗庄区豪德五金机电城
75栋114-119号
如果你是一个工业机器人行业的小白,那么你需要了解如下基本知识:
一、什么是工业机器人?
机器人是一个在三维空间具备较多自由度的,能实现众多拟人动作和工能的机器设备。而工业机器人则是在工业生产上使用的机器人,它的特征是可编程、拟人化、通用性、机电一体化。
二、工业机器人有哪些子系统,各自的作用是什么?
1.驱动系统:使机器人运转起来的传动装置;
2.机械系统:由本体、手腕、末端执行器构成的一个自由度的机械系统;
3.传感系统:由内部传感器控制模块和外部传感器控制模块构成 获得内部和外部环境状态的信息;
4.机器人&环境交互系统:实现工业机器人与外部环境中的设备互相联络和协调的系统;
5.人机交互系统:是实际操作工作人员参与机器人控制与机器人进行联络的设备;
6.自动控制系统:按照机器人的作业命令程序及其从传感器反馈过来的信号支配机器人的执行机构去进行要求的运动和功能。
三、什么是机器人的自由度?机器人位置操作和姿态操作各需几个自由度?
自由度就是指机器人所具备的独立坐标轴运动的数量,不可包含手爪(末端工具)的开合自由度,在三维空间中描述1个物体的位置和姿态需用六个自由度,位置操作需用三个自由度(腰、肩、肘),姿态操作需用三个自由度(俯仰、偏航、侧滚)。工业机器人的自由度是按照其主要用途而设计的,可能低于6个自由度,也可能超过6个自由度。
四、工业机器人的关键参数有哪些?
工业机器人的关键参数,主要有自由度、重复定位精度、工作范围、最高工作速度与承载能力。
五、机身和臂部的作用各是什么?在设计时该需注意什么问题?
机身是支承臂部的部件,通常实现升降回转和俯仰等运动,机身设计时要有足够的刚度和稳定性;运动要灵敏,升降运动的导套长度不能过短,防止造成卡死状况,通常要有导向设备;构造布局要合理臂部是支承腕部手部和工件的静动载荷的部件,特别是在高速运动时将形成很大的惯性力,引发冲击,影响定位的精确性。
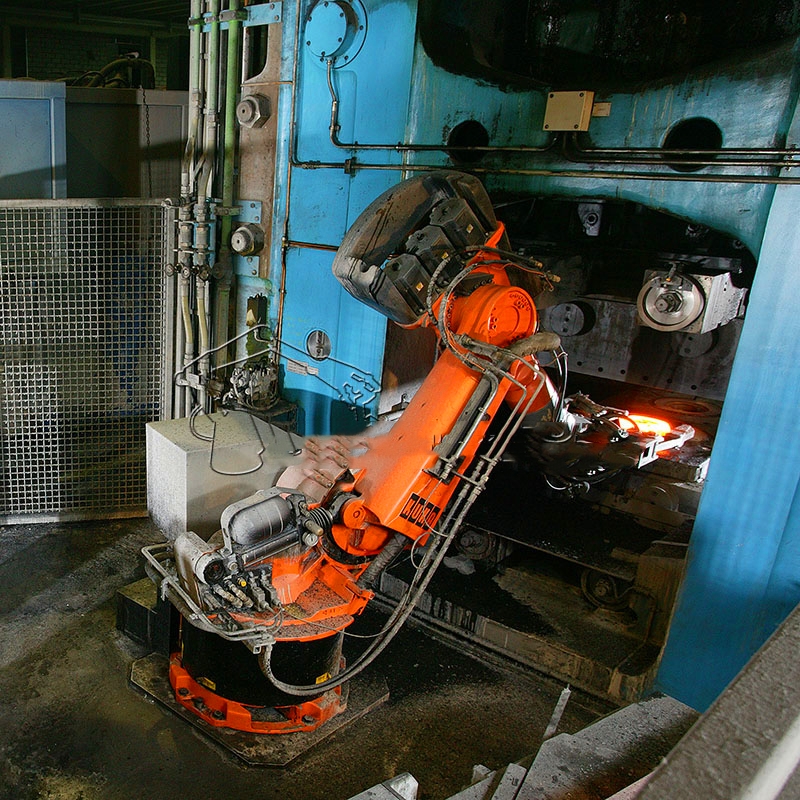
设计臂部时要注意刚度要求高,导向性好,重量轻,运动要平稳,定位精度要高。其它传动系统应尽量简短以提高传动精度和效率;各部件布置要合理,操作维护要方便;特殊状况特殊考虑,在高温作业环境中应考虑到热辐射的影响腐蚀性自然环境中应考虑到防腐蚀问题。危险自然环境应考虑到防暴问题。
六、手腕上的自由度主要起什么作用?假如要求手部能位于空间随机方向,手腕应具备怎样的自由度?
手腕上的自由度关键是实现手部所期望的姿态。为了使手部能位于空间随机方向,规定腕部能实现对空间3个坐标轴X Y Z的转动。即具备翻转俯仰和偏转3个自由度。
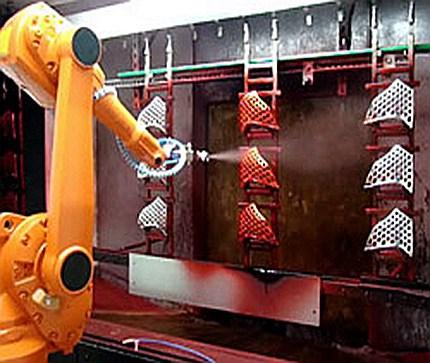
七、机器人末端工具的功能和特点?
机器人手部是用于握持工件或工具的部件,是一个单独的部件,可以有手爪还可以是专用工具。
八、末端工具分为哪几类?
按夹持原理,末端夹持手可分两类:
1.夹持类,包括内撑式、外夹式、平移外夹式、勾托式和弹簧式;
2.吸附类,包含磁吸式,气吸式。
九、真空式吸盘按照工作原理可分成几类?其工作原理是如何的?
真空式吸盘按工作原理可分三类:
1.真空吸盘,运用真空泵抽去吸附头的气体而形成真空;
2.喷吸式吸盘,借助伯努利效应形成负压,流体速率变快时,物体与流体触及的界面上的压力会减小,反之压力会提高,借助于空气压缩和真空发生器不需要专用型真空泵;
3.挤气负压式吸盘,靠机械作用建立真空和释放真空,不需要真空泵系统也不需要压缩空气,气源经济便捷但可靠性稍弱。
十、液压和气压传动在操作力、传动性能和控制性能方面的区别?
1.操作力:液压可获得很大的直线运动力和回转力,抓取净重1000到8000N;气压可获得较小的直线运动力和回转力,抓取净重小于300N。
2.传动特性:液压压缩性小传动稳定,无冲击,通常无传动滞后状况,表明灵敏运动速度最大达2m/s;气压压缩空气粘度小管路损失小流速大可达较高速度但高速时平稳性差冲击较严重一般汽缸50到500mm/s。
3.控制性能:液压压力和流量均易于控制,可无极调速通过调节;气压低速不易控制,难准确定位,通常不做伺服控制。
十一、伺服电机和步进电机的性能有何不同?
1.控制精度:伺服电机控制精度由电机轴后端的旋转编码器保障,伺服电机控制精度大于步进电机;
2.低频特性:伺服电机转动十分稳定,即便低速时也不会出现震动状况,通常伺服电机低频性能好于步进电机;
3.过载能力:步进电机不享有过载能力,伺服电机具备很强的过载能力;
4.运转性能:步进电机的控制为开环控制,交流伺服电机驱动系统为闭环控制;
5.速度响应性能:交流伺服系统加速度性能较好。
山东北工智能装备有限公司,是一家集新旧工业机器人销售调剂维修保养,智能工厂自动化改造,工业机器人非标集成,工业机器人教育培训为一体的高端智能装备科技公司,主要经营德国库卡KUKA,瑞士ABB,日本安川YASKAWA,日本发那科FANUC,国产卡诺普CRP等工业机器人。联系电话:13355076661、13355053226。

















 【关注我们】
【关注我们】