



山东北工智能装备有限公司(山东北工机器人)
电话:0539-8056556(豪德店)
手机:13355053226(尹)
13355076661(陈)
13220533358(闫)
QQ: 2992886958
邮箱:beigongkuka@163.com
地址:临沂市罗庄区豪德五金机电城
75栋114-119号
山东北工智能装备有限公司(山东北工机器人)
电话:0539-8056556(豪德店)
手机:13355053226(尹)
13355076661(陈)
13220533358(闫)
QQ: 2992886958
邮箱:beigongkuka@163.com
地址:临沂市罗庄区豪德五金机电城
75栋114-119号
一、全范围工作机械手按照不同的结构形态可分为直角坐标机械手、并联机械手、SCARA机械手,这三种机械手因通常无干涉区、所以能够在整个工作范围内进行工作。
1.直角坐标机械手:手腕参考点定位通过三维直线运动实现,其作业空间如图1所示的实心立方体。

2.并联机械手:手腕参考点定位通过3个并联轴的摆动实现,其工作范围如图2所示三维空间的锥底圆柱体。

3.SCARA机械手:手腕参考点定位通过3轴摆动各垂直升降实现,其作业范围为图3所示的三维空间圆柱体。

二、部分范围工作机械手可分为圆柱坐标机械手、球坐标机械手、垂直串联机械手,因需要去除机械手的运动干涉区,所以只能部分空间工作。
1.圆柱坐标机械手:手腕参考点定位通过2轴直线加1轴回转摆动实现,由于摆动轴存在运动死区,所以工作范围如图4所示三维空间的部分圆柱体。

2.球坐标机械手:手腕参考点通过1轴直线加2轴回转摆动实现,其摆动轴和回转轴均存在运动死区,作业范围如图5所示三维空间部分球体。

3.垂直串联关节型机械手:手腕参考定位通过腰、下臂、上臂3个关节的回转和摆动实现,摆轴存在运动死区,其工作范围如图6所示的三维空间不规则球体。

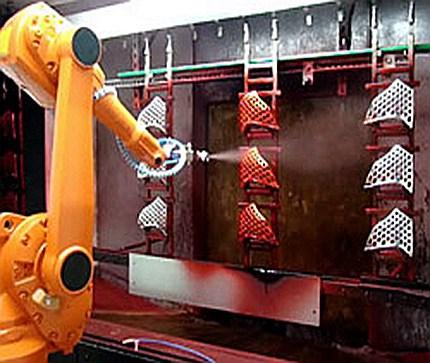
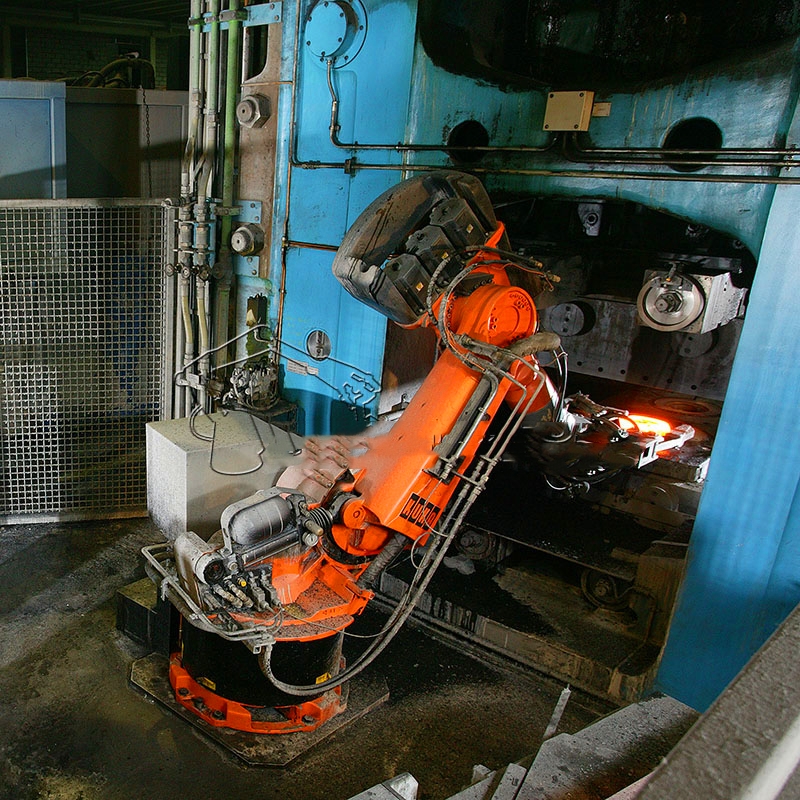
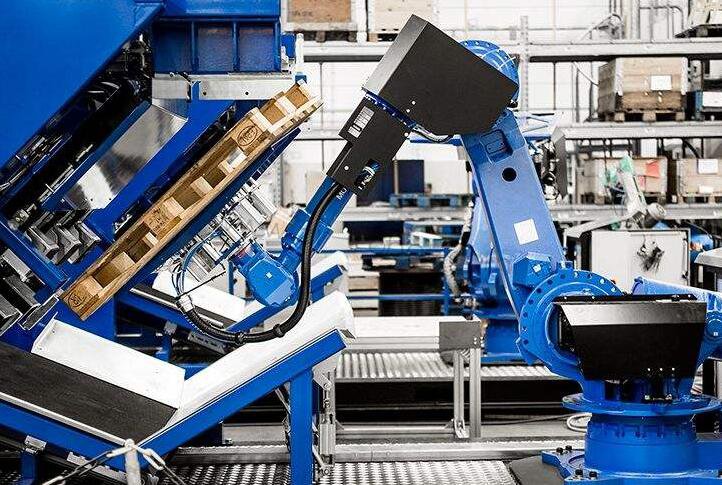
山东北工智能装备有限公司,是一家集新旧工业机器人销售调剂维修保养,智能工厂自动化改造,工业机器人非标集成,工业机器人教育培训为一体的高端智能装备科技公司,主要经营德国库卡KUKA,瑞士ABB,日本安川YASKAWA,日本发那科FANUC,国产卡诺普CRP等工业机器人。联系电话:13355076661、13355053226。

















 【关注我们】
【关注我们】